
Does your robot design touch the ground on 2 or 3 or 4 points?
Tricycle is common. Fixed angle mounts or direct turning?
Simple dual differential drive or all wheels active?
How about 3 wheels and 3 rotors? Or 4,6,8 legs?
Steering front wheel, fixed rear, and 2 sidecars?
How many platforms would be needed to experiment with all of those?
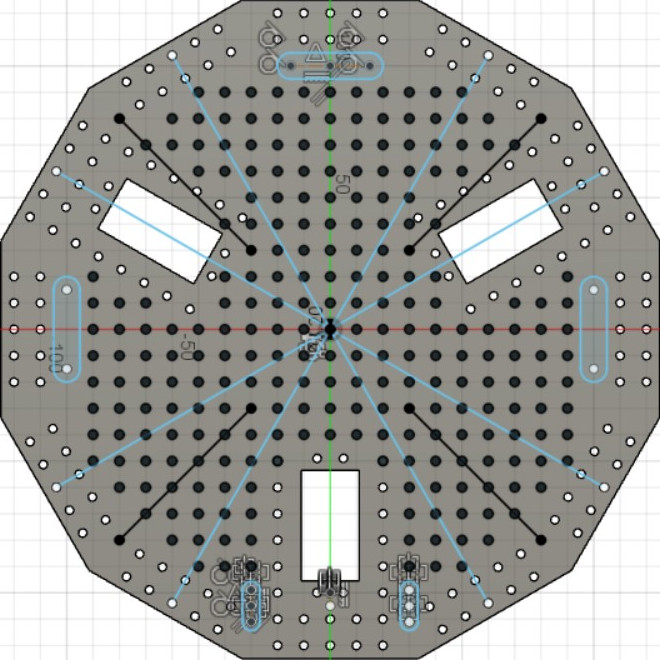
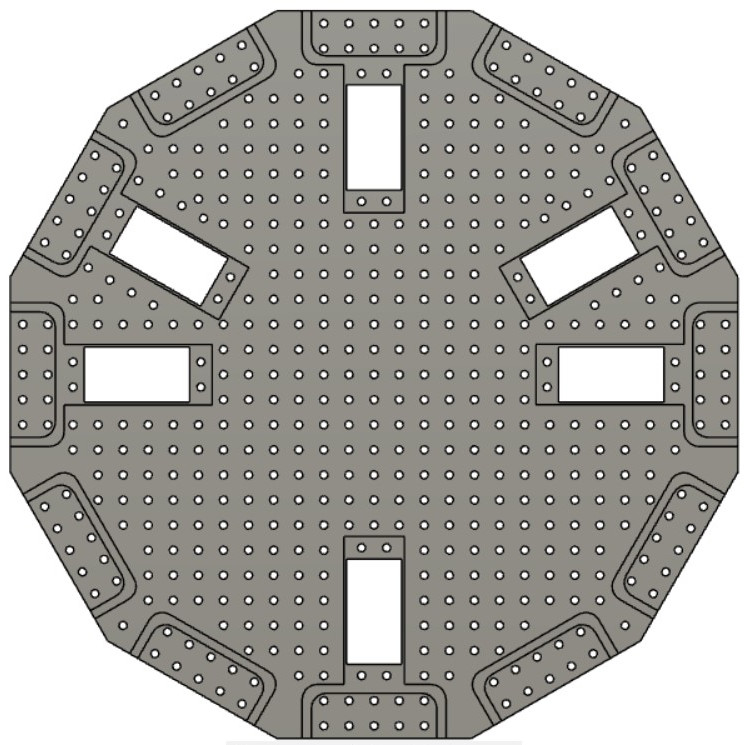
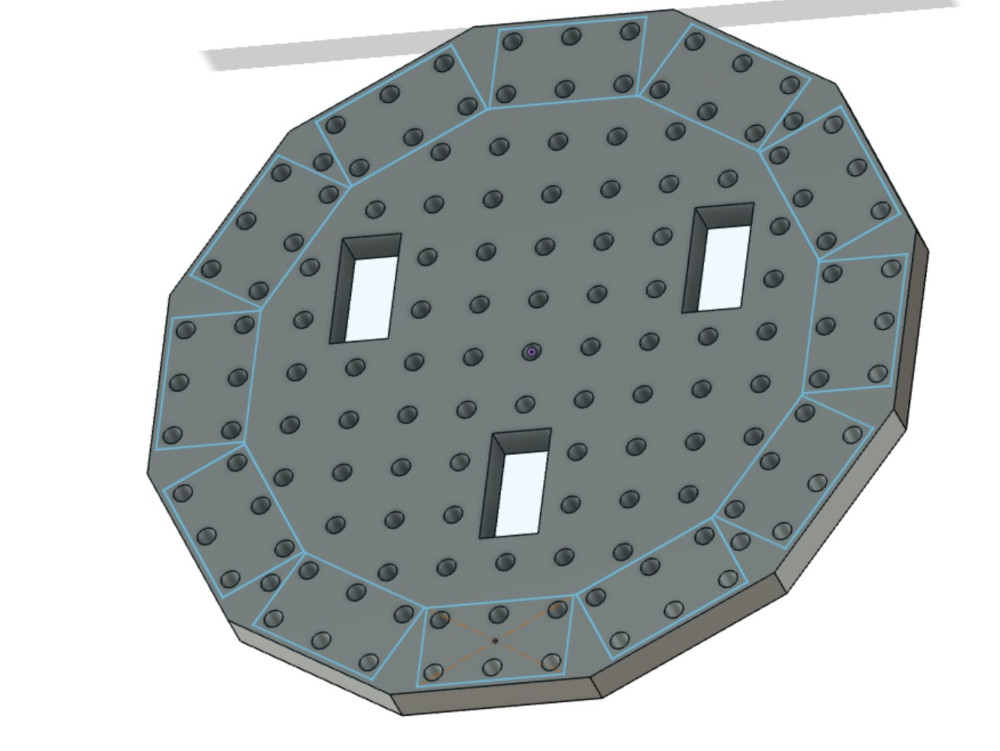
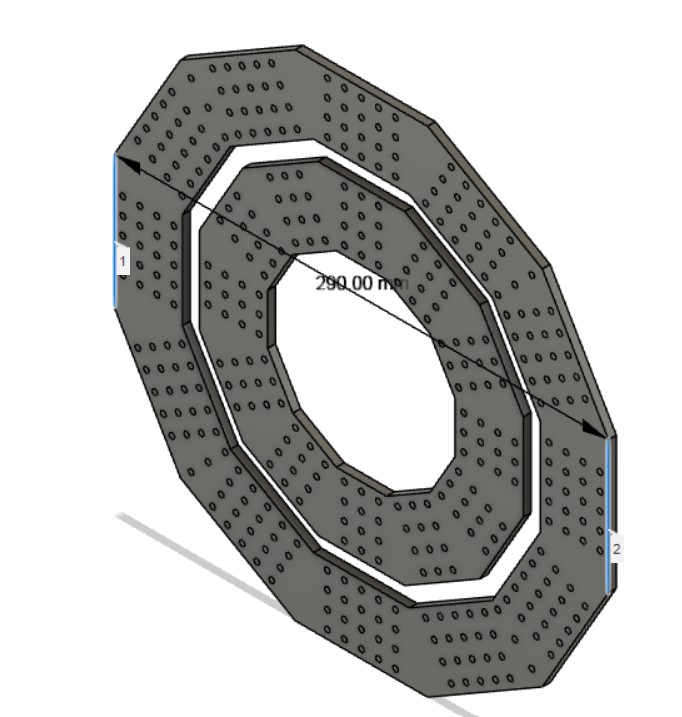
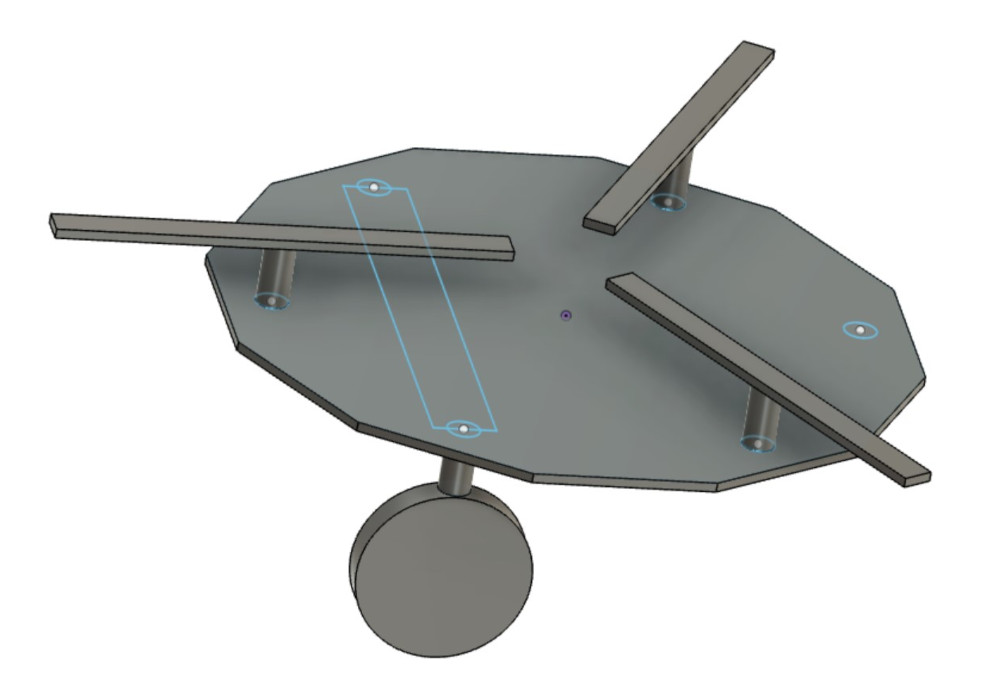
The 12 sided dodecagon has 2,3,4 fold symmetry for these and many other configurations.
updated 2023-10-10