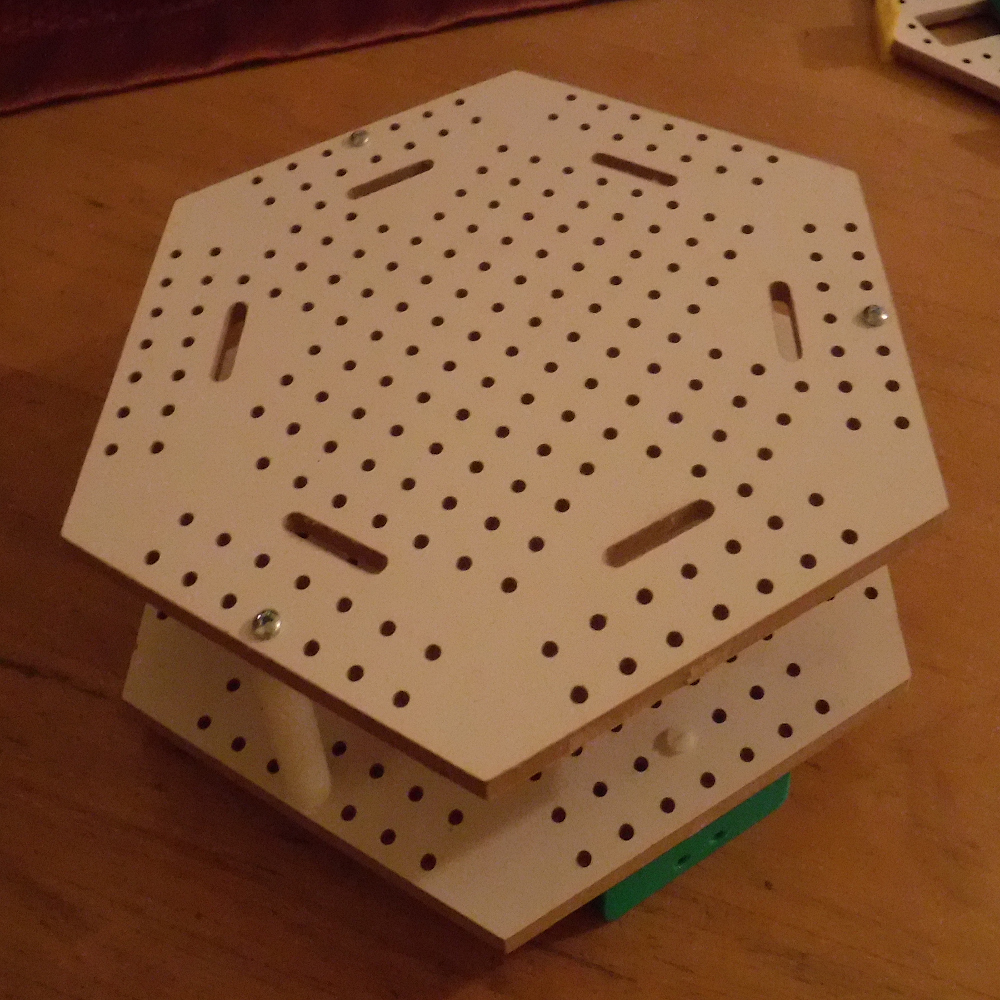
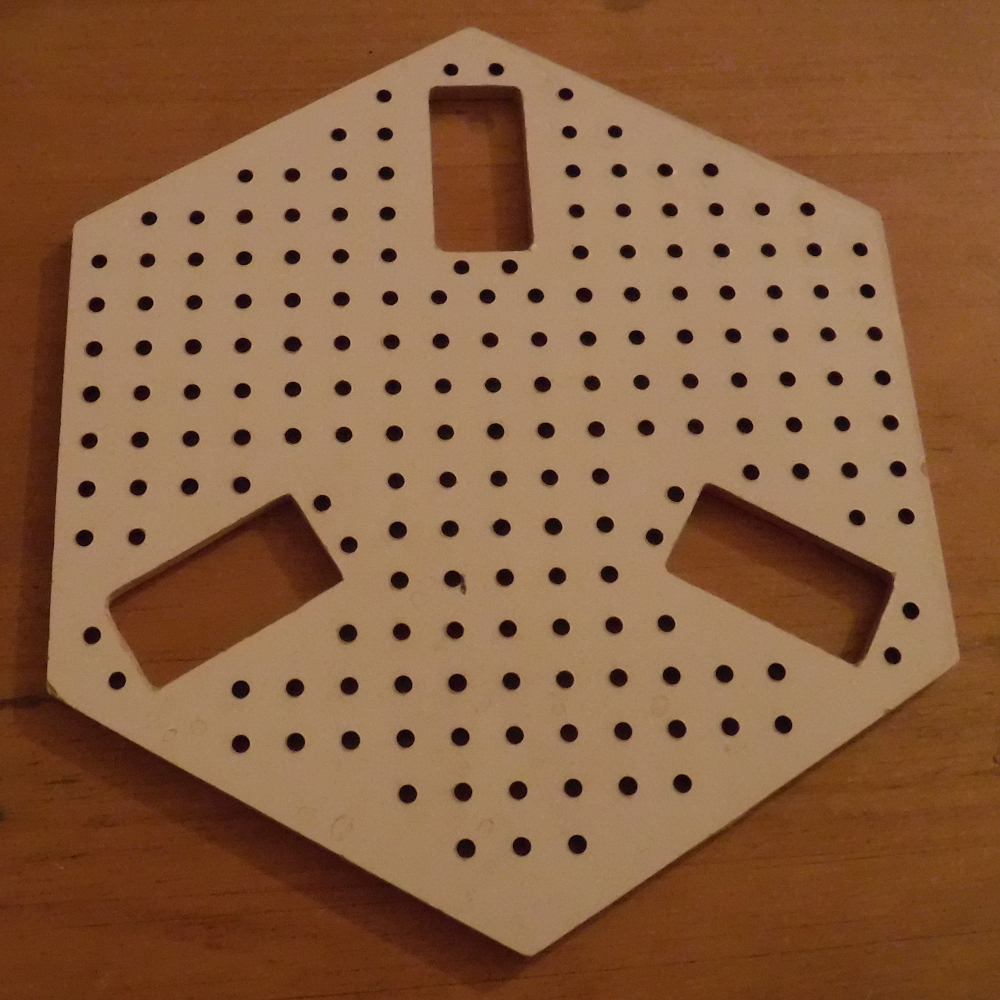
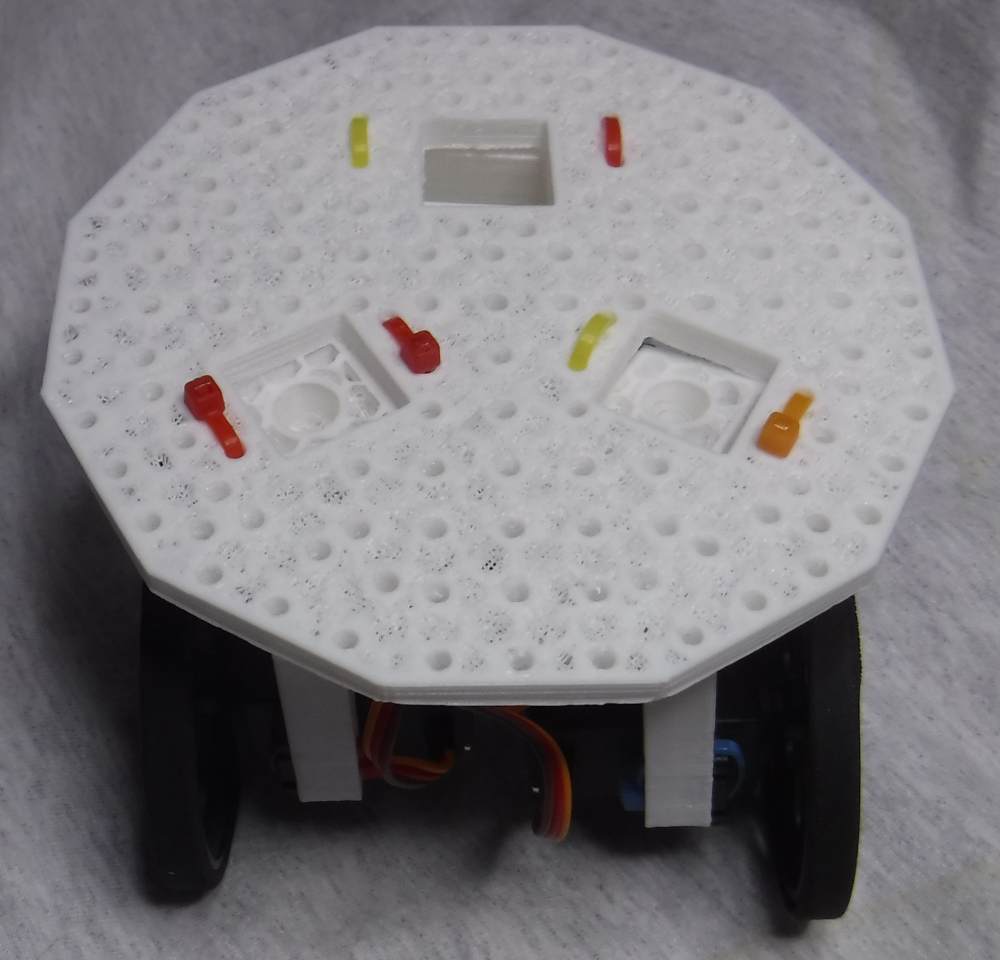
This is my hex shaped Palm Pilot Robot Kit from Acroname/CMU (2000). It had 3 distance
sensors and 3 mechanum style wheels, with rollers that allow for movement in any direction.

3 active wheels was refreshing in a world of 4 wheeled "Ackermann"s,
but this only works on tables and bare floors, not even office carpet.
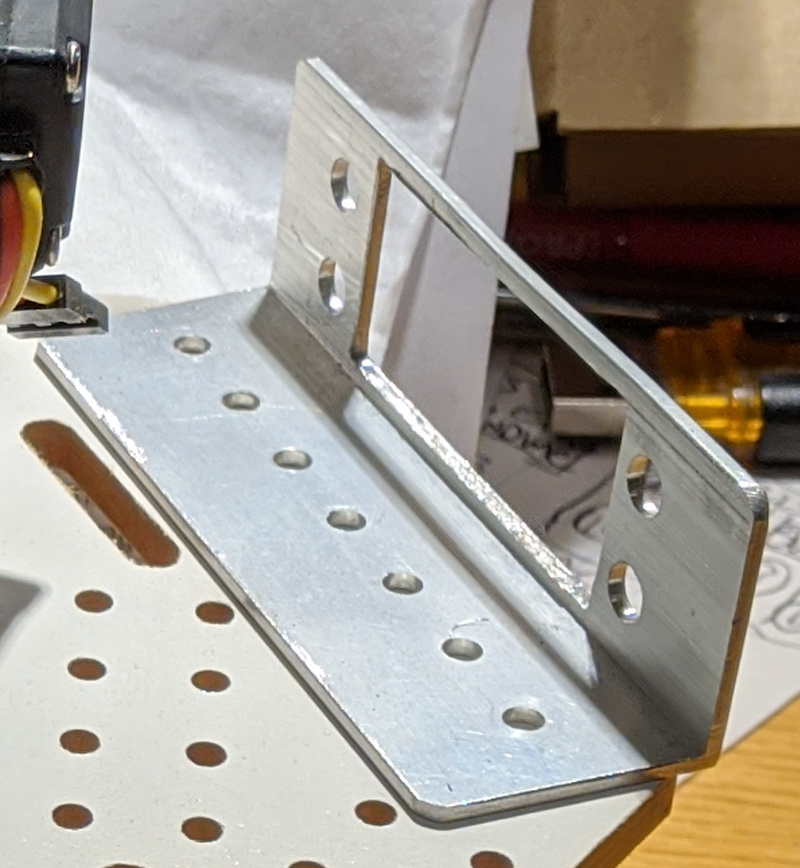
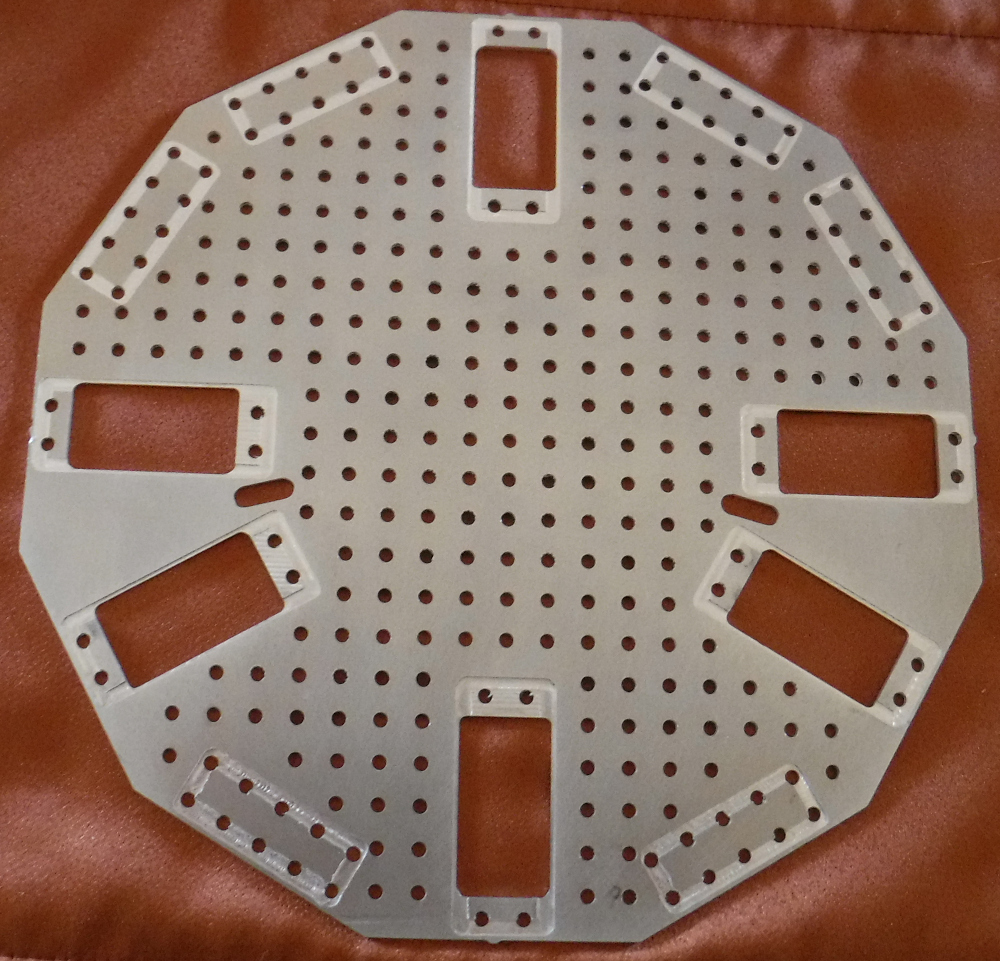
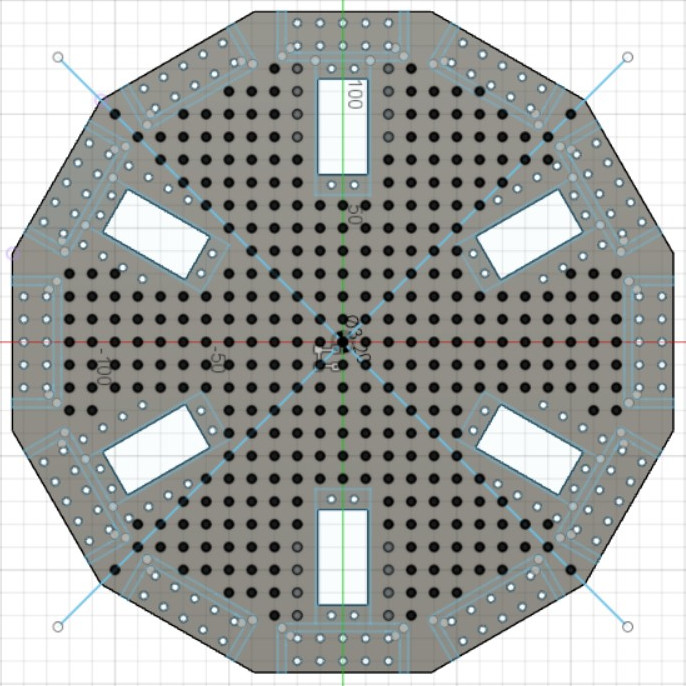
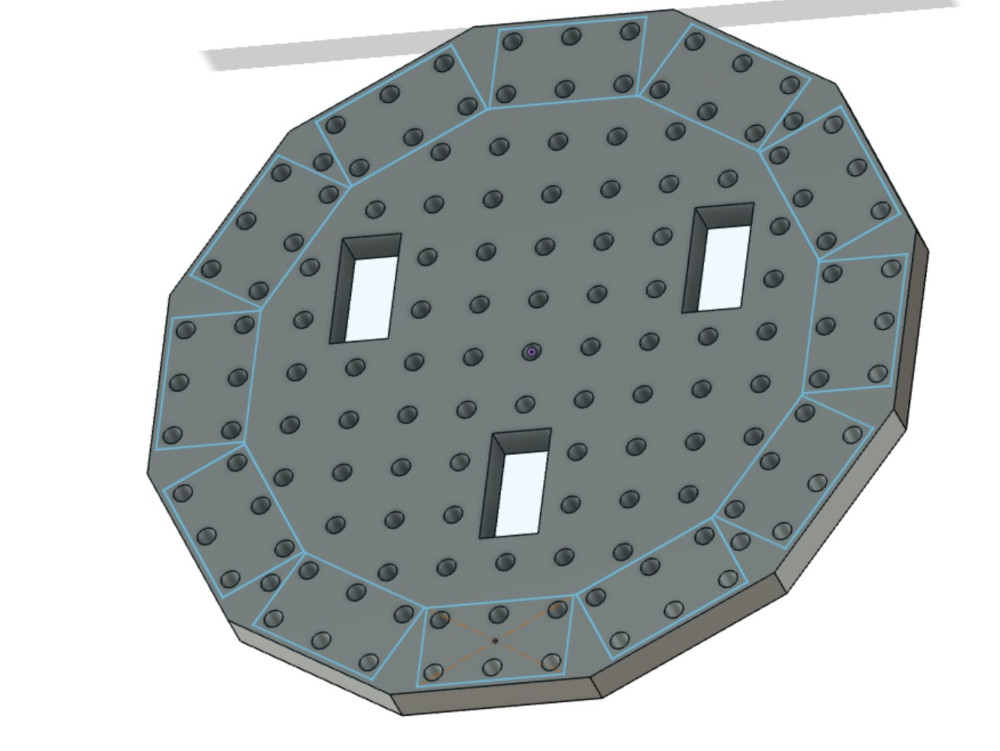
1/10 inch center breadboards are everywhere, but there is no similar
standard for mounting boards and small mechanical components.
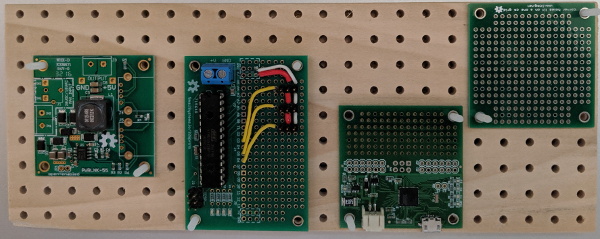
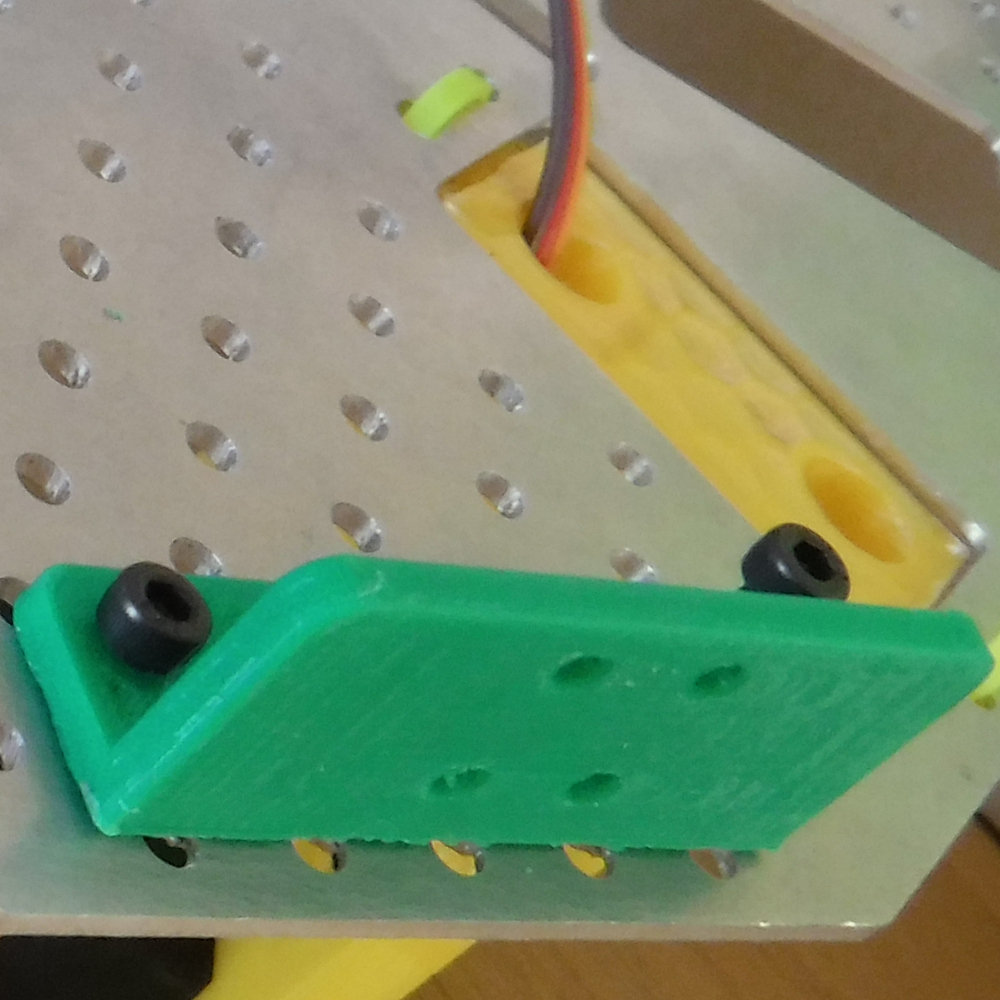
All of my small board designs since 2013 have mounting holes for 1 cm grids.
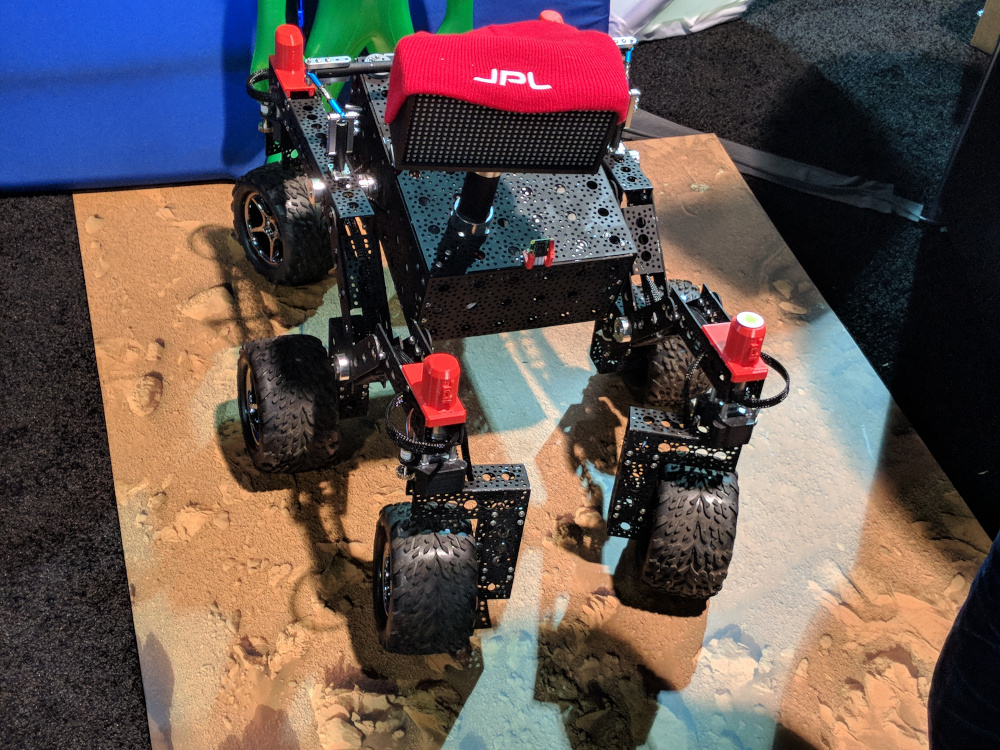
Rovers with terrain capable wheels from JPL at CES 2018, and
NASA at Maker Faire 2019, both with wheels turned by other motors.
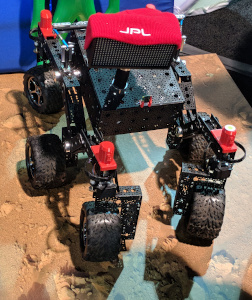
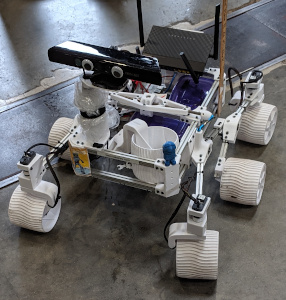
The rocker and outriggers design seems overly complex and probably
too expensive for low budget experimenters without
research grants.
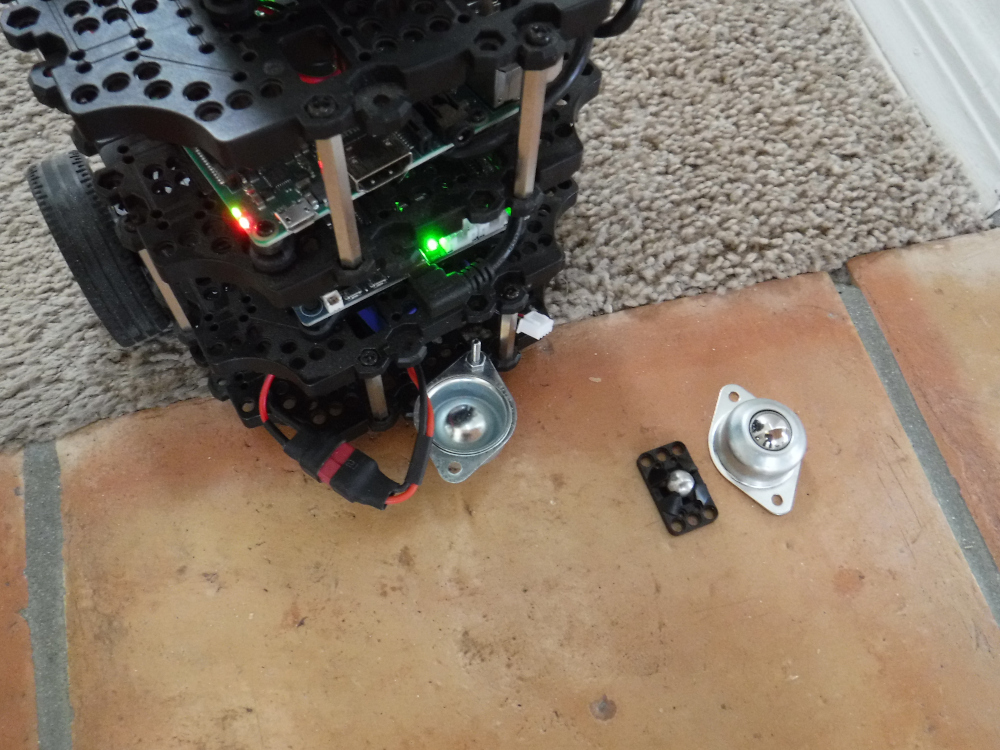
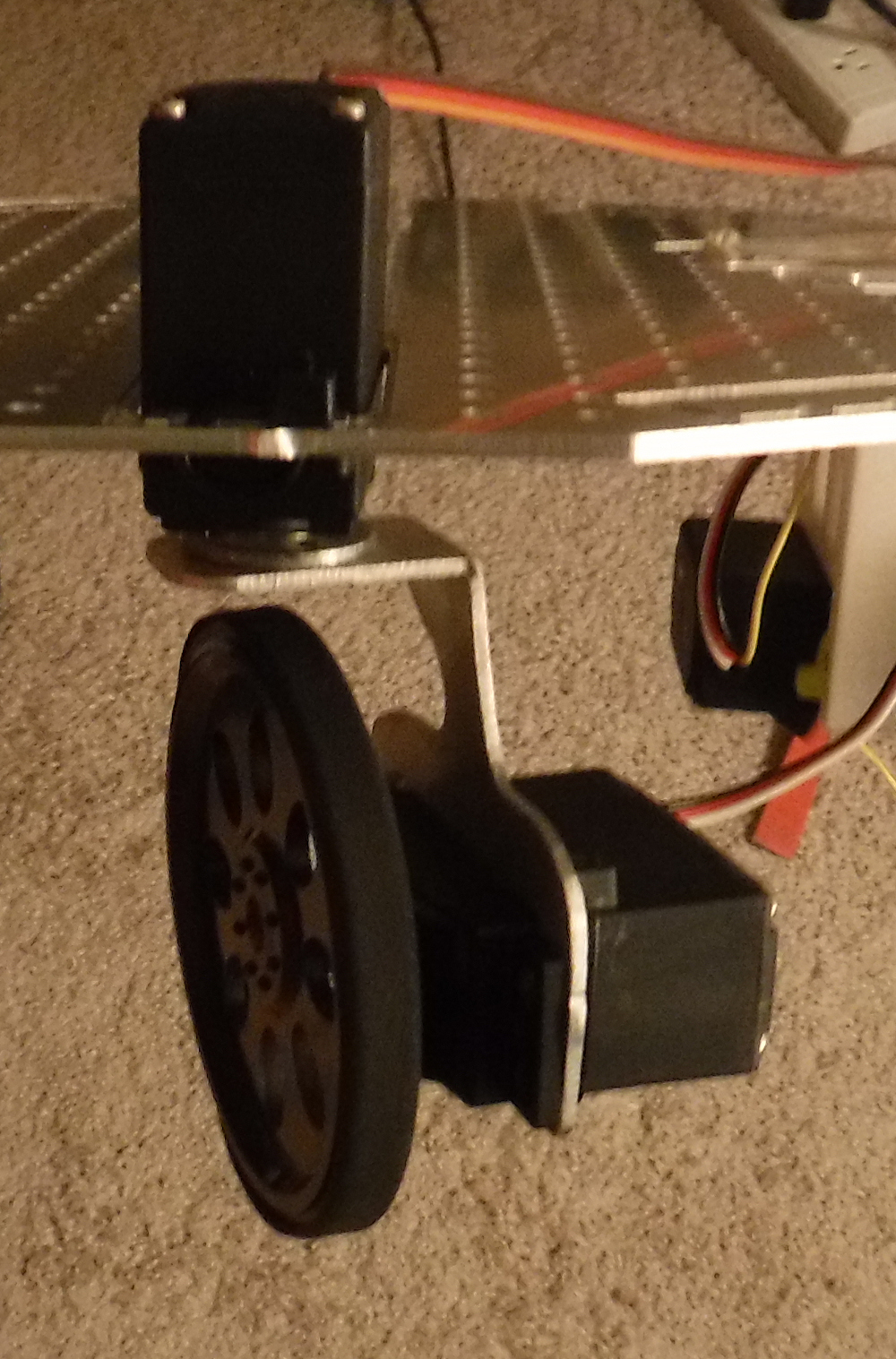
The Turtlebot3 is a standard platform for working with the
Robot Operating Sytem (ROS/2). I first saw them at CES 2018,
and bought this smaller Burger model in early 2020.

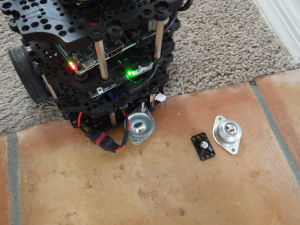
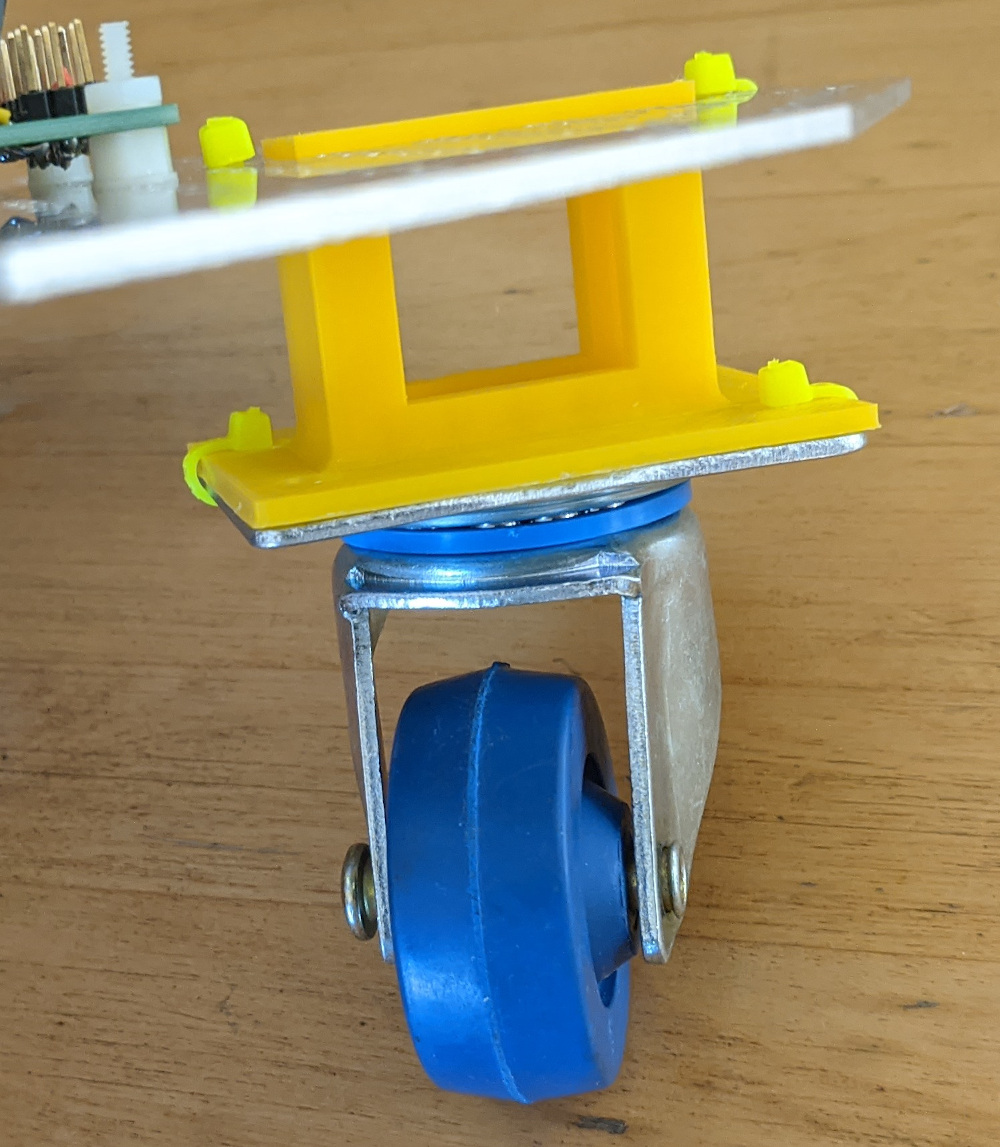
It uses two wheel dual-differential drive and a 3rd support roller.
The tiny ball is useless on home carpet, and even this
larger ball caster gets hung up often in the tile grooves.




{kind=link}