On the left is the common wobbly spindle and rubber band thing.
And a much nicer smooth self-contained 3D printed design.
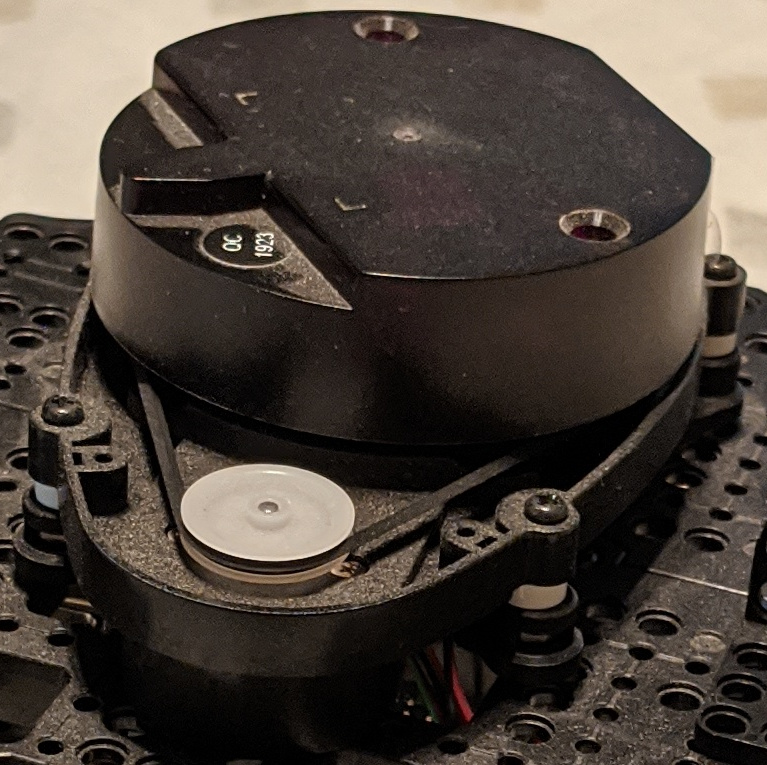
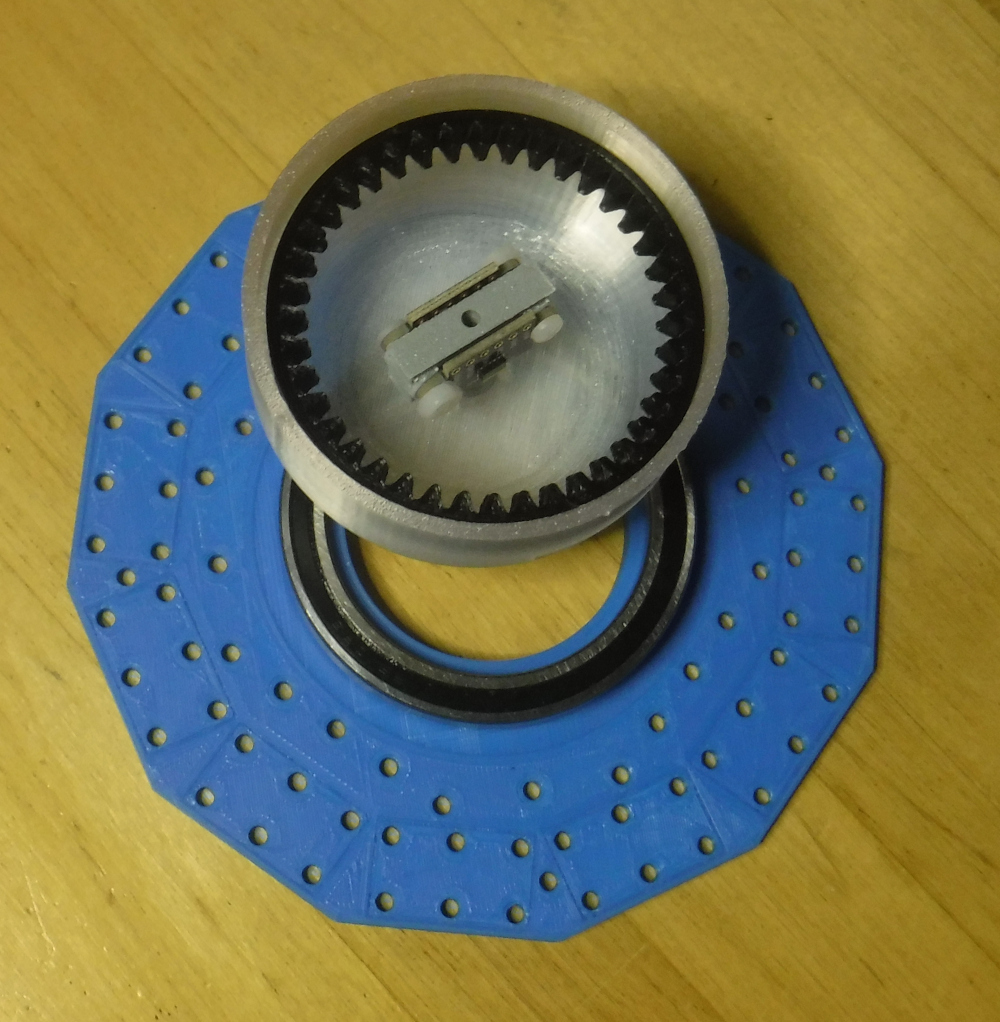
I put the motor under the dome and a gear inside the dome lower edge.
The TimeOfFlight sensors are mounted on a paddle from the top of the dome.
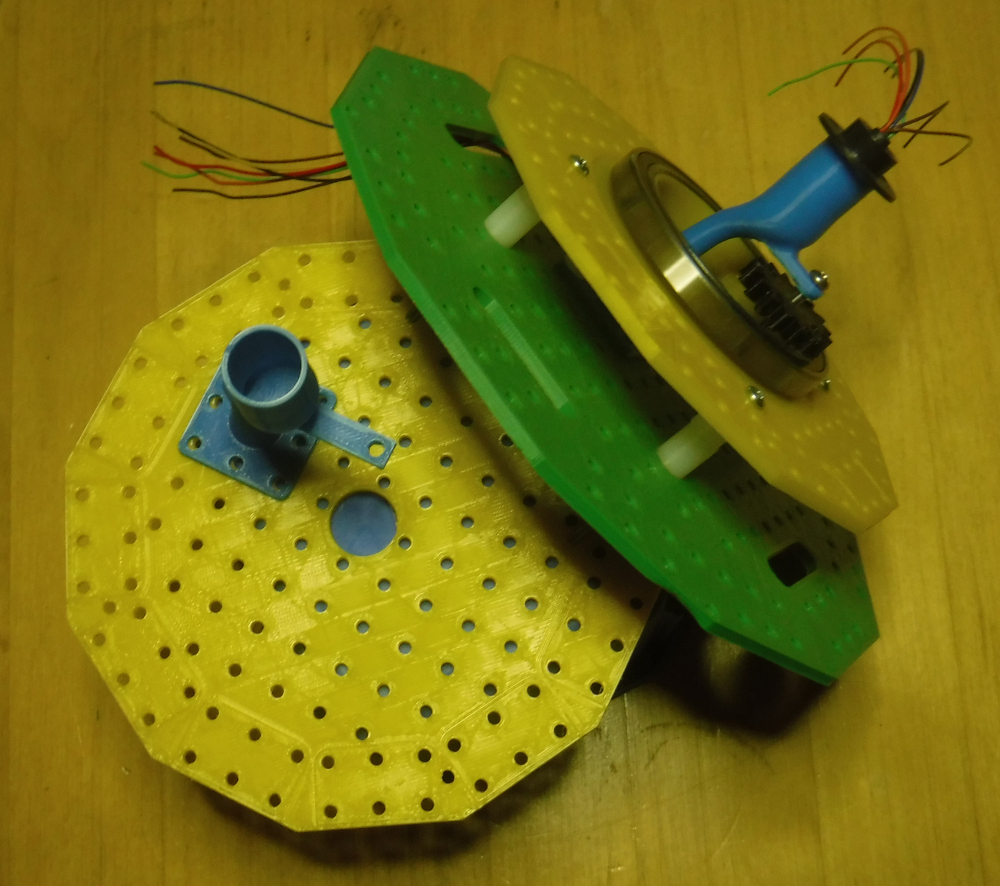
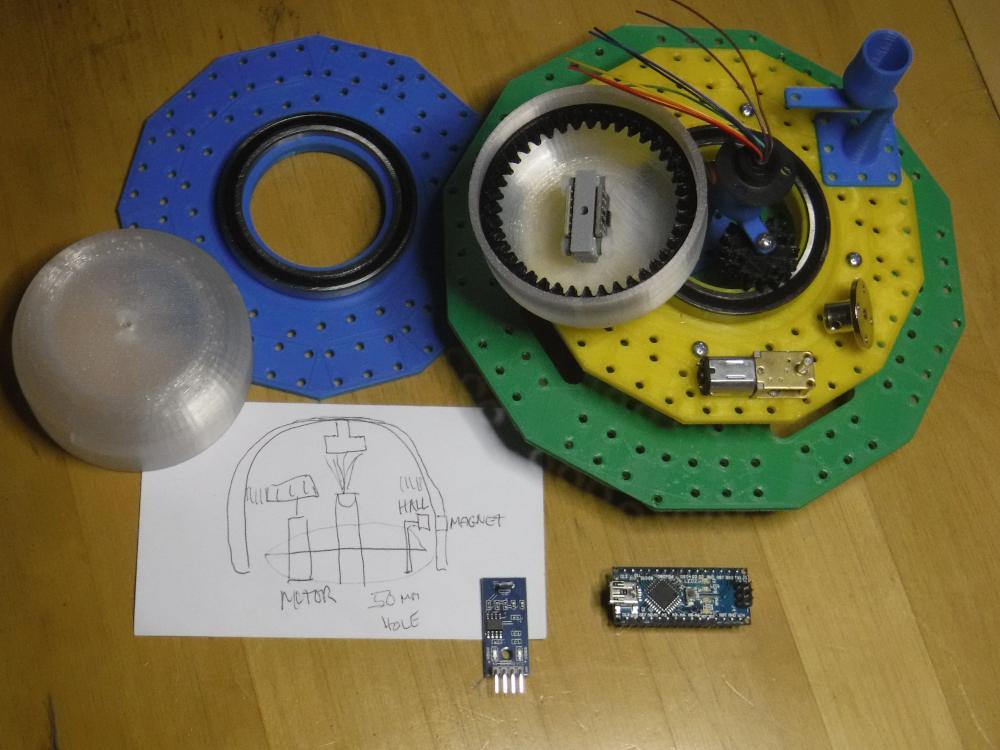
The ToFs have i2c interfaces, wires go through the slip-ring, through the little pedestal
down to CPU boards. The pedestal is hollow for wires and it holds up the drive gear.
The bottom of the dome is held rigid by a steel bearing on the disk.
The bearing might be designed out later.